Problems Solved
by:
Dave Archer | Principal Engineer
Peak Innovations Engineering
9934 N. Alpine Rd., Suite 104
Machesney Park, IL 61115 USA
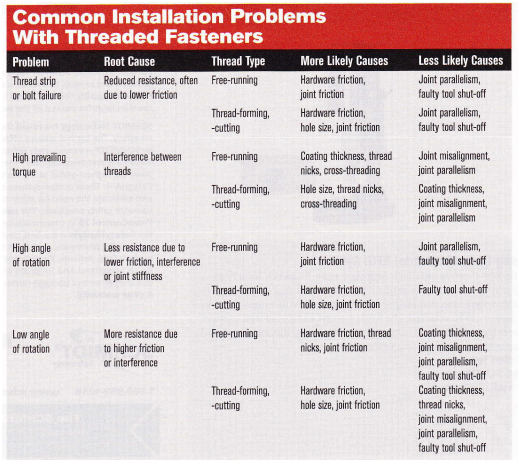
Bolted joints are the vast majority of our consulting business. Our work is divided evenly between validating joints under development and troubleshooting problems with existing joints. Our troubleshooting experience led us to develop the matrix below to help engineers solve common problems with bolted joints. Distilling even the most common problems and solutions into the confines of this column requires simplification that may invite critical judgment from veteran hands. Our experience is many engineers could benefit from reviewing the relationship between a problem and its likely underlying causes. One assumption inherent in the matrix is the joints are fastened with a power tool capable of accurate and repeatable shut-off, such that operator influence is unlikely. Note that the angle of rotation is listed as a problem, though only a subset of controlled tools can report angle.
Thread strip, bolt failure, and high prevailing torque are easily detected with any type of tool. However, they represent extreme problems. Knowing the angle required to rotate the fastener from a known and repeatable starting point to the target torque provides insight into joint conditions between those extremes. The angle of rotation governs the clamp load, and in turn, determines the reliability of most joints. While not as convenient or accurate as an integral angle encoder, the rotation angle can be determined manually by match-marking. Such manual measurements are not done on every joint, so problems caused by clamp load being outside the expected range are not realized until the product is in the field. This is one of the main drivers in the expanded use of sensory tools.
Company Profile:
Peak Innovations Engineering has a highly technical team to design, test, validate, and enhance the bolted joints within your product application. Joint development and testing are all we do, so we do it better than other available options, both internal and external. Why consume your resources engineering and problem-solving areas that are secondary to your core responsibilities when we can take care of them quickly, definitively, and cost-effectively? www.pieng.com